
Problemów tego typu można uniknąć, stosując kontrolery ruchu FAULHABER opracowane specjalnie pod kątem współpracy z silnikami miniaturowymi i mikrosilnikami oraz przetestowane w rzeczywistych warunkach roboczych. Kontrolery te „szacują” temperaturę uzwojenia danego silnika na podstawie modeli o zróżnicowanej złożoności. Pozwala to w pełni wykorzystać cały zakres dynamiki silnika, np. do szybkiego pozycjonowania. Redukują również natężenie prądu, zanim dojdzie do przegrzania uzwojeń. Wymagane parametry są wygodnie przesyłane do kontrolera napędu z poziomu okna dialogowego wyboru silnika w oprogramowaniu FAULHABER Motion Manager.
Dodatkowe informacje o integracji termicznej dla danego zastosowania można wykorzystać w przechowywanych w sterownikach modelach w celu dalszego ich ulepszania. Jak dobrze chłodzony jest silnik? Czy konieczne jest ograniczenie jego wydajności z powodu wysokiej temperatury otoczenia? Czy używane są przekładnia i enkoder? Tego typu dane umożliwiają wykorzystanie pełnej mocy silnika np.
w pracujących cyklicznie napędach komory klimatycznej – kontroler śledzi wartości temperatury otoczenia przesyłane przez układ sterowania komorą klimatyczną i wykorzystuje je w swoich modelach. To samo dotyczy sytuacji, gdy znane są cykle obciążenia. Wówczas silnik może być mniejszy, co jest zaletą zwłaszcza w przypadku urządzeń mobilnych.
Niska elektryczna stała czasowa, która zapewnia większą dynamikę procesów, może powodować dodatkowe straty wynikające z modulacji szerokości impulsów (PWM), co jest dość powszechnym zjawiskiem w kontrolerach napędów. Typowa elektryczna stała czasowa w silnikach bezrdzeniowych FAULHABER wynosi około 10 μs. Przy częstotliwościach PWM poniżej 50 kHz w wielu przypadkach osiągnięcie stałego momentu obrotowego podanego w danych technicznych w wielu przypadkach nie jest możliwe lub prowadzi do przegrzewania się silnika. Z tego powodu przy wyborze kontrolera ruchu niezwykle ważne jest, aby jego częstotliwość PWM była odpowiednio wysoka. W kontrolerach ruchu FAULHABER wynosi ona zazwyczaj od 78 do 100 kHz, zależnie od typu. W zależności od rodzaju modulacji na silnik oddziałuje częstotliwość do 200 kHz, co jest zgodne z wymaganiami mniejszych silników.
Mocne i ekstremalnie zminiaturyzowane
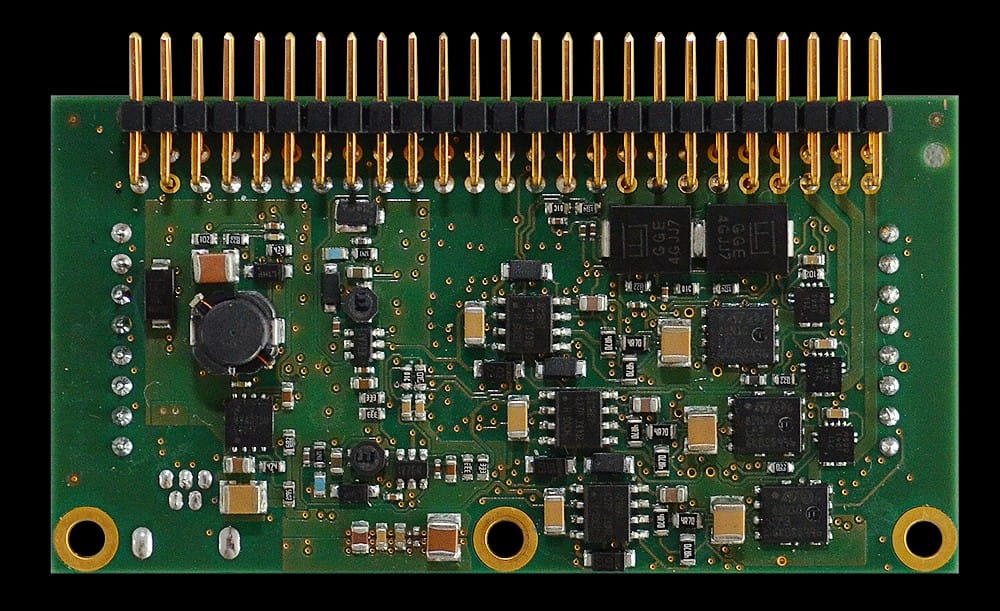
Sprawdzające się od wielu lat kontrolery ruchu z rodziny MC V3.0 nie nadają się do sterowania mikrosilnikami FAULHABER ze względu na swój rozmiar i rozdzielczość wbudowanych układów pomiaru prądu silnika. I tu wkracza nowy model, MC 3001 B/P: to pierwszy kontroler ruchu, który jest idealnie dostosowany do mniejszych serwonapędów zarówno pod kątem wielkości, jak i rozdzielczości pomiaru prądu. Przy maksymalnym napięciu zasilania rzędu 30 V ten kontroler ruchu o wymiarach 16 x 27 x 2,6 mm (szer. x dł. wys.) osiąga natężenie stałe wynoszące 1 A i natężenie szczytowe wynoszące 5 A. Przy niższym napięciu zasilania, np. 12 V, umożliwia osiągnięcie stałego natężenia o wartości do 2 A. Jednocześnie cechuje się funkcjonalnością porównywalną do większych modeli z tej samej gamy. Opcje wejść/wyjść i interfejs enkodera są takie same jak w pozostałych produktach z tej rodziny. Kontroler dostępny jest z interfejsami komunikacyjnymi USB, RS232 i CANopen. Istnieje również możliwość doposażenia go w kompaktowy interfejs EtherCAT podłączany do płyty (głównej) klienta.

Kontrolery dostępne są w dwóch wariantach: Model z płaskimi złączami typu płytka-płytka (MC 3001 B) to doskonałe rozwiązanie w przypadku podłączania kilku kontrolerów do jednej karty. Wariant MC 3001 P zawiera złącze wtykowe z obudową 2,54 mm z trzech stron. Dzięki temu kontroler można łatwo zintegrować z posiadanym systemem, np. w wieloosiowym systemem automatyki laboratoryjnej. To naprawdę wydajne kontrolery ruchu nawet do najmniejszych napędów DC firmy FAULHABER, idealnie dopasowane do silników zarówno pod względem wielkości, jak i funkcji.































































